¶ First Complex Project: Implementing an RCNN from Scratch for Object Detection
After working with simpler object detection models, we will now implement a Region-based Convolutional Neural Network (RCNN) from scratch. Unlike YOLO, which directly predicts bounding boxes, RCNN uses a two-step process:
- Extracting region proposals from an image.
- Classifying and refining bounding boxes using a CNN.
This project will cover:
- Loading and preprocessing a dataset (Pascal VOC or COCO).
- Extracting Selective Search region proposals.
- Training a CNN for object classification.
- Using a Bounding Box Regressor to refine detections.
¶ 1. Setting Up the Environment
First, install the required dependencies:
pip install torch torchvision opencv-python numpy matplotlib scikit-learn tqdm
or if you prefer conda...
conda install -c conda-forge cudatoolkit=12.6 cudnn=9.1.0
conda install pytorch torchvision torchaudio pytorch-cuda=12.4 -c pytorch -c nvidia
¶ 2. Loading the Dataset
We use Pascal VOC 2007 since it provides labeled images with bounding boxes. Download the dataset:
import torchvision
from torchvision import transforms
import torch
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
# Define transformation for input images
transform = transforms.Compose([
transforms.Resize((224, 224)),
transforms.ToTensor()
])
# Load Pascal VOC dataset
dataset = torchvision.datasets.VOCDetection(root="./data", year="2007", image_set="train", download=True, transform=transform)
# View an image and its bounding boxes
image, target = dataset[0]
plt.imshow(image.permute(1, 2, 0)) # Convert from (C, H, W) to (H, W, C)
plt.show()
print(target)
Some images from Pascal VOC 2007 dataset

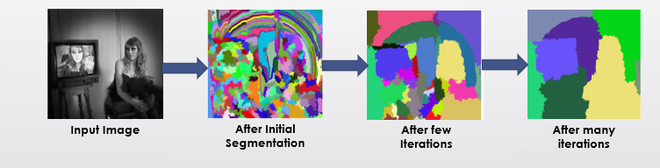
¶ 3. Extracting Region Proposals with Selective Search
RCNN requires candidate region proposals, which we extract using Selective Search from OpenCV:
import cv2
import numpy as np
def get_region_proposals(image):
ss = cv2.ximgproc.segmentation.createSelectiveSearchSegmentation()
ss.setBaseImage(image)
ss.switchToSelectiveSearchFast() # Faster version (less accurate)
rects = ss.process()
return rects[:2000] # Select top 2000 proposals
# Convert PIL image to OpenCV format
image_cv = cv2.cvtColor(np.array(image.permute(1, 2, 0)), cv2.COLOR_RGB2BGR)
regions = get_region_proposals(image_cv)
# Draw regions on the image
for (x, y, w, h) in regions[:50]: # Show first 50 proposals
cv2.rectangle(image_cv, (x, y), (x + w, y + h), (0, 255, 0), 1)
plt.imshow(cv2.cvtColor(image_cv, cv2.COLOR_BGR2RGB))
plt.show()
A visual representation of how selective search works
¶ 4. Training a CNN for Object Classification
Each region proposal is cropped and resized to 224x224 to train a classification model (based on ResNet18).
import torch.nn as nn
import torch.optim as optim
from torchvision.models import resnet18
from torch.utils.data import Dataset
class RCNN_Dataset(Dataset):
def __init__(self, image, regions, labels, transform=None):
self.image = image
self.regions = regions
self.labels = labels
self.transform = transform
def __len__(self):
return len(self.regions)
def __getitem__(self, idx):
x, y, w, h = self.regions[idx]
cropped = self.image[:, y:y+h, x:x+w] # Crop region proposal
cropped = transforms.Resize((224, 224))(cropped)
label = self.labels[idx]
if self.transform:
cropped = self.transform(cropped)
return cropped, label
# Create a dataset using proposals
labels = [0] * len(regions) # Placeholder: Replace with ground-truth labels
rcnn_dataset = RCNN_Dataset(image, regions, labels, transform=transform)
rcnn_loader = DataLoader(rcnn_dataset, batch_size=16, shuffle=True)
# Define the CNN model (ResNet-based)
class RCNN(nn.Module):
def __init__(self, num_classes=20):
super(RCNN, self).__init__()
self.model = resnet18(pretrained=True)
self.model.fc = nn.Linear(512, num_classes) # Modify final layer
def forward(self, x):
return self.model(x)
# Train the model
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = RCNN(num_classes=20).to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)
# Training loop
for epoch in range(5):
for images, labels in rcnn_loader:
images, labels = images.to(device), labels.to(device)
optimizer.zero_grad()
outputs = model(images)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
print(f"Epoch [{epoch+1}/5], Loss: {loss.item():.4f}")
¶ 5. Bounding Box Regression for Precise Localization
We add a second bounding box regression head to refine predictions:
class RCNNWithRegressor(nn.Module):
def __init__(self, num_classes=20):
super(RCNNWithRegressor, self).__init__()
self.feature_extractor = resnet18(pretrained=True)
self.feature_extractor.fc = nn.Identity() # Remove last FC layer
self.classifier = nn.Linear(512, num_classes)
self.regressor = nn.Linear(512, 4) # Predicts (dx, dy, dw, dh)
def forward(self, x):
features = self.feature_extractor(x)
class_logits = self.classifier(features)
bbox_deltas = self.regressor(features)
return class_logits, bbox_deltas
# Train classifier and regressor together
model = RCNNWithRegressor(num_classes=20).to(device)
criterion_cls = nn.CrossEntropyLoss()
criterion_bbox = nn.MSELoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)
for epoch in range(5):
for images, labels in rcnn_loader:
images, labels = images.to(device), labels.to(device)
optimizer.zero_grad()
class_logits, bbox_deltas = model(images)
loss_cls = criterion_cls(class_logits, labels)
loss_bbox = criterion_bbox(bbox_deltas, torch.zeros_like(bbox_deltas)) # Placeholder
loss = loss_cls + loss_bbox
loss.backward()
optimizer.step()
print(f"Epoch [{epoch+1}/5], Classification Loss: {loss_cls.item():.4f}, BBox Loss: {loss_bbox.item():.4f}")
¶ 6. Testing on New Images
image, _ = dataset[10]
image_cv = cv2.cvtColor(np.array(image.permute(1, 2, 0)), cv2.COLOR_RGB2BGR)
regions = get_region_proposals(image_cv)
model.eval()
for (x, y, w, h) in regions[:50]:
cropped = image[:, y:y+h, x:x+w]
cropped = transforms.Resize((224, 224))(cropped)
cropped = cropped.unsqueeze(0).to(device)
with torch.no_grad():
class_logits, bbox_deltas = model(cropped)
label = torch.argmax(class_logits).item()
if label != 0:
cv2.rectangle(image_cv, (x, y), (x + w, y + h), (255, 0, 0), 2)
plt.imshow(cv2.cvtColor(image_cv, cv2.COLOR_BGR2RGB))
plt.show()
Results on Pascal VOC 2007 Dataset

¶ Key Takeaways
✔ RCNN extracts region proposals and classifies them with CNNs
✔ Bounding box regression improves localization
✔ Unlike YOLO, it is slower but more accurate for small objects
Next Steps: Try and Implement Faster RCNN with Region Proposal Networks (RPN) for real-time performance!